MFront in
CalculiX
CalculiXUser-defined mechanical behavior can be implemented using three different interfaces:
CalculiX interface.ABAQUS umat routines for linear
materials (small strain analyses).ABAQUSNL umat routines for non-linear
materials (finite strain analyses).There are two ways of introducing user-defined mechanical behavior:
CalculiX sources. This option is supported
for the three interfaces.Each of these approaches has its own advantages and its own pitfalls.
The first one is intrusive and requires a partial recompilation of
CalculiX, which means having access to the sources and the
rights to install the executable if it is meant to be deployed on a
system-wide location.
The second one does not require any modification to
CalculiX, is generally easier to set up and is very
flexible. There is no intrinsic limitation on the number of shared
libraries and functions that can be dynamically loaded. It is thus quite
feasible to create mechanical behaviours databases by creating a shared
library for each specific material. Such libraries will only be loaded
if needed. In such an approach, the mechanical behaviour is dedicated to
a specific material and is self-contained: it has no external
parameter.
Shared libraries can be shared between co-workers by moving them on a shared folder.
However, experience shows that using shared libraries can be
confusing for some users as they have to update their environment
variables (PATH on Windows or LD_LIBRARY_PATH
on Unixes) for the libraries to be usable. Shared libraries can also be
more sensitive to system updates.
Note
Calling external libraries from
CalculiXfor theABAQUSandABAQUSNLis supported inCalculiXsince version2.12. If you are compilingCalculiXfrom the sources, you must use theMakefile_MFrontfile (which is part of the sources) to enable it.Calling external libraries from
CalculiXfor the native interface requires a patch in version2.12that can be downloaded here.
CalculiX native interfaceWhen compiling a MFront behaviour, the
CalculiX native interface is invoked as follows:
$ mfront --obuild --interface=calculix Chaboche.mfront
Treating target : all
The following library has been built :
- libCALCULIXBEHAVIOUR.so : CHABOCHEThe libCALCULIXBEHAVIOUR.so is generated in the
src subdirectory. This library shall be copied in a
location where the dynamic load can find it. Another solution is to add
the src directory to the LD_LIBRARY_PATH as
follows:
$ export LD_LIBRARY_PATH=$(pwd)/src:$LD_LIBRARY_PATHA template for the behaviour declaration has been generated in the
calculix subdirectory.
**
** File generated by MFront from the Chaboche.mfront source
** Example of how to use the Chaboche behaviour law
** Author Jean - Michel Proix
** Date 26 / 11 / 2013
**
*Material, name=@CALCULIXBEHAVIOUR_CHABOCHE
*Depvar
19
** The material properties are given as if we used parameters to explicitly
** display their names. Users shall replace those declaration by
** theirs values
*User Material, constants=12
<YoungModulus>, <PoissonRatio>, <R_inf>, <R_0>, <b>, <k>, <w>, <C_inf_0>,
<C_inf_1>, <g_0_0>, <g_0_1>, <a_inf>The interesting part here is the name of the material:
CALCULIXBEHAVIOUR_CHABOCHE, which can be decomposed in two
parts separated by the underscore character (_):
CALCULIXBEHAVIOUR, is used to determine
in which library the external function is implemented.CHABOCHE, gives the name of external
function to be called.Here, the library name has been stripped from system-specific
convention (the leading lib and the .so
extension). The base name of the library and the name of the
function must be upper-cased. This is due to the way
CalculiX interprets the input file.
The material name can optionally end with an identifier beginning by
the @ character. This character can be followed by any
character and is used to declare two distinct materials based on the
same external behaviour having different material coefficients. For
example, the following example declares two distinct materials relying
on the same external behaviour:
*Material, name=@CALCULIXBEHAVIOUR_ELASTICITY@1
** The material properties are given as if we used parameters to explicitly
** display their names. Users shall replace those declaration by
** theirs values
*User Material, constants=2
150000,0.3
*Material, name=@CALCULIXBEHAVIOUR_ELASTICITY@2
*User Material, constants=2
200000,0.3In finite strain, CalculiX replaces the linearised
strain by the Green-Lagrange strain and interprets the output of the
behaviour as the second Piola-Kirchhoff stress. This allows small strain
behaviours to be used in the context of finite rotations and this
procedure is equivalent to the FiniteRotationSmallStrain
introduced by MFront in most interfaces. However, this
procedure is said to be limited to small strain because the trace of the
Green-Lagrange strain is not related to the change of volume, which is
the basis of most behaviours describing plasticity and viscoplasticity
in small strain: indeed, even though the plastic strain is traceless,
the plastic flow will not be isochoric.
The situation is quite different in the ABAQUSNL
interface where the Hencky strain (logarithmic strain) is used (see
below): the trace of the logarithmic strain is directly linked to the
change of volume.
This situation is also different from the strategy used in
Abaqus/Standard which tries to integrate the behaviour in
rate form and then uses the Jauman objective stress rate to ensure
objectivity (see [1]): this approach is based on
the fact that the trace of the deformation rate is directly linked to
the change of volume.
To describe plasticity and viscoplasticity at finite strain using an
additive decomposition of the strain, we recommend using the
‘MieheApelLambrechtLogarithmicStrain’ finite strain strategy in
MFront which is also based on the Hencky strain but
interprets the output of the behaviour as the dual of the Hencky strain,
which is consistent from the point of view of energy and automatically
ensures objectivity. See [2] for details.
Abaqus/Standard interfaceFor performance reasons, CalculiX supports two kinds of
interfaces to Abaqus/Standard’s umat
behaviours:
ABAQUS is meant to describe linear materials.ABAQUSNL is meant to describe nonlinear materials. For
nonlinear materials the logarithmic strain and infinitesimal rotation
are calculated, which slows down the calculation. Consequently, the
nonlinear routine should only be used if necessary.Those two interfaces support the call to behaviours in external shared libraries.
Calling shared libraries is triggered by putting the @
character in front of the material name. The material name is then
decomposed into three parts, separated by the _
character:
ABAQUS or
ABAQUSNL).For instance, if we want to call a small strain behavior in a linear
analysis, implemented by the CHABOCHE function in the
libABAQUSBEHAVIOURS.so shared library (Under
Windows, the library name has the dll
extension.), one would declare the following material name:
@ABAQUS_ABAQUSBEHAVIOURS_CHABOCHE
MFront behaviours generated through the
abaqus interfaceAs described in the previous section, calling shared libraries is
only supported for the ABAQUS or ABAQUSNL
interfaces. This means that we can call mechanical behaviours generated
by MFront through the abaqus interface quite
easily.
The abaqus interface is described here.
Consider the Saint-Venant Kirchoff hyperelastic behaviour as implemented here.
The library is generated like this:
$ mfront --obuild --interface=abaqus SaintVenantKirchhoffElasticity.mfront
Treating target : all
The following library has been built :
- libABAQUSBEHAVIOUR.so : SAINTVENANTKIRCHHOFFELASTICITY_AXIS SAINTVENANTKIRCHHOFFELASTICITY_PSTRAIN SAINTVENANTKIRCHHOFFELASTICITY_3DThis shows that the library libABAQUSBEHAVIOUR.so has
been generated. Then, we have one implementation per modelling
hypothesis. For a \(3D\) computation,
one shall use the SAINTVENANTKIRCHHOFFELASTICITY_3D
function.
Thus, the material name to be used is:
@ABAQUSNL_ABAQUSBEHAVIOUR_SAINTVENANTKIRCHHOFFELASTICITY_3D.
Known issue with
CalculiX2.12The source code generated by MFront contains a test that checks if the behaviour is called in a finite strain resolution. This information is not available in
CalculiX2.12, so the generation of the library must be made as follows:
- Generate the sources:
$ mfront --interface=abaqus SaintVenantKirchhoffElasticity.mfront
- Modify the sources:
Comment all the blocks in the
src/abaqusSaintVenantKirchhoffElasticity.cxxfile of the form:if(KSTEP[2]!=1){ std::cerr << "the SaintVenantKirchhoffElasticity behaviour is only valid in finite strain analysis\n"; *PNEWDT=-1; return; }
- Compile the library:
$ mfront --obuild
Another solution is to deactivate checks (for
TFELgreater than 3.1) like this:$ mfront --obuild -D MFRONT_ABAQUS_NORUNTIMECHECKS --interface=abaqus SaintVenantKirchhoffElasticity.mfront
The description of a simple tensile test is as follows:
**
** GEOMETRY
**
*Node
1, 0., 0., 1.
2, 0., 1., 1.
3, 0., 0., 0.
4, 0., 1., 0.
5, 1., 0., 1.
6, 1., 1., 1.
7, 1., 0., 0.
8, 1., 1., 0.
*Element, type=C3D8, elset=cube
1, 5, 6, 8, 7, 1, 2, 4, 3
*Solid Section, elset=cube, material=@ABAQUSNL_ABAQUSBEHAVIOUR_SAINTVENANTKIRCHHOFFELASTICITY_3D
,
*Nset, nset=sx2, generate
5, 8, 1
*Nset, nset=sx1, generate
1, 4, 1
*Nset, nset=sy1
1, 3, 5, 7
*Nset, nset=sy2
2, 4, 6, 8,
*Nset, nset=sz1
3, 4, 7, 8
*Nset, nset=sz2
1, 2, 5, 6,
**
** MATERIAL
**
*Material, name=@ABAQUSNL_AbaqusBehaviour_SaintVenantKirchhoffElasticity_3D
*Depvar
0
* User Material, constants=2
150e9, 0.34
**
** LOADING
**
*Step, nlgeom=YES
*Static
0.02, 1., 1e-05, 0.2
*Boundary
sx1, 1, 1
*Boundary
sy1, 2,2
*Boundary
sz1, 3,3
*Boundary
sx2, 1, 1, 0.2
*EL PRINT, ELSET=cube
E, S
*End StepNamed state variables
MFrontgenerates an example showing how to use the behaviour inAbaqus/Standard. Such example names each state variables, which is useful for post-processing. However, this feature is currently not supported byCalculiX.
ABAQUS and
ABAQUSNL interfacesIn CalculiX 2.12, the value of the NSTATV
argument passed to the ABAQUS and ABAQUSNL
interfaces is the maximum number of state variables for all the
materials. This is not consistent with Abaqus/Standard
which passes the number of state variables of the material.
The same remarks apply to the number of the material properties
(NPROPS argument).
This issue can be circumvented by disabling checks in
MFront:
$ mfront --obuild -D MFRONT_ABAQUS_NORUNTIMECHECKS --interface=abaqus SaintVenantKirchhoffElasticity.mfront
CalculiX 2.12The source code generated by MFront contains a test that checks if
the behaviour is called in a finite strain resolution. This information
is not available in CalculiX 2.12. See the
SaintVenantKirchhoffElasticity example for details of how
to circumvent this issue.
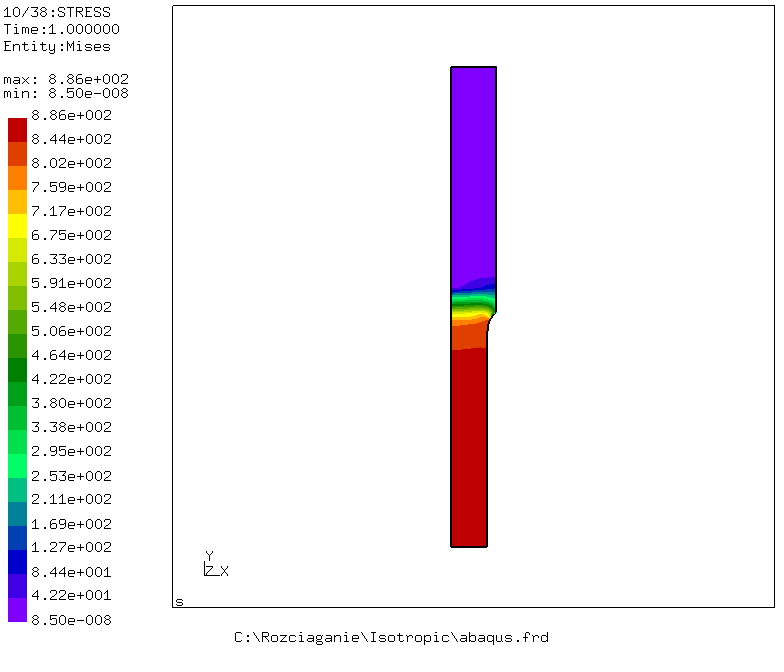
This example describes a tensile test on an AE specimen using an isotropic linear hardening plasticity behaviour depicted on the previous figure.
CPU times between the native implementation and the MFront
implementation (using the CalculiX interface) are reported
in the following table:
CalculiX |
MFront |
|
|---|---|---|
| real | 7m43.588s | 8m6.849s |
| user | 7m40.572s | 7m59.904s |
| sys | 0m4.180s | 0m6.676s |
Those figures show that using the MFront implementation
is \(4.9\%\) slower. Using the
callgrind profiling tool of valgrind
framework, one can see that more time is spent in looking for function
calculix_searchExternalBehaviours than in the behaviour
integration: \(2.65\%\) of the time vs
\(1.66\%\) !
This is due to the mostly non-intrusive way of introducing external
behaviours in CalculiX. This additional cost could totally
disappear with a more clever and intrusive development.
If those 2.65% are removed from the total computational time, the
MFront implementation only causes a \(2.3\%\) slow down, which is acceptable.
This slow down could be due to the fact that the MFront
behaviours update the elastic strain and recompute the stress (it does
not simply update it by adding an increment, as this is done in most
implementations). Using the elastic strain is mandatory to handle
properly material properties changing with temperature and thermal
expansion.