We present here an implementation of Taylor homogenization scheme
[1] using
BehaviourVariable keyword. This implementation allows using
arbitrary local behaviours on each phase.
This tutorial first recalls the presentation of Taylor
scheme, which is the generalization of Voigt scheme for non-linear
behaviours. The derivation is very simple and allows to compute the
tangent operator without resolving any non-linear problem. The local
tangent operators are however needed.
The files Plasticity.mfront and
Taylor.mfront are available in the
MFrontGallery project, here.
It is possible to implement this homogenization scheme through a
Behaviour. This Behaviour must call the
behaviour laws of each phase. So, an interesting solution is to use a
BehaviourVariable.
@BehaviourVariableFirst step consists in creating variables which will allow to
compute, on each phase, the local stress as a function of the local
strain, and the local tangent operator as a function of the local
strain. In short, it’s about being able to easily call a local
Behaviour in the macroscopic Behaviour. These
local Behaviour must be implemented before in
.mfront files.
For the sake of simplicity, we will assume that we have 2 phases
whose behaviour is elastoplastic with a Von Mises criterion with linear
isotropic hardening. Material parameters are different between the
phases. This behaviour is implemented in the file
Plasticity.mfront, with the yield stress and hardening
modulus as parameters.
@DSL IsotropicPlasticMisesFlow;
@Behaviour Plasticity;
@Epsilon 1e-14;
@UseQt true;
@MaterialProperty stress H;
@MaterialProperty stress s0;
@FlowRule {
f = seq - H * p - s0;
df_dseq = 1;
df_dp = -H;
}Then, in Taylor.mfront, we use the Default
DSL:
Creation of BehaviourVariable is done as follows:
@BehaviourVariable b1 {
file: "Plasticity.mfront",
variables_suffix: "1",
external_names_prefix: "FirstPhase",
shared_external_state_variables: {".+"}
};@BehaviourVariable block creates a variable named
b1, representing our behaviour law on phase \(1\).Behaviour, with an added suffix, here \(1\) for phase \(1\). For example, we can use
eto1, the total strain of phase \(1\), or sig1 for the stress,
and the same is true for other variables, e.g. eel1 or
p1 for the cumulative plastic strain.MFront, will have an added
prefix FirstPhase, as specified by line \(4\).For more details on using @BehaviourVariable, the reader
can see the documentation of
BehaviourVariable
Finally, it will be necessary to create 2
@BehaviourVariable for the 2 phases.
After having defined the BehaviourVariable, we can
implement the @Integrator block. Before this block, We
specify that the tangent operator will be calculated inside the
@Integrator block, given its very simple form, in the case
of the Taylor scheme. This is done via
@ProvidesTangentOperator.
@ProvidesTangentOperator;
@Integrator{
b1.deto=deto;
constexpr auto b1_smflag = TangentOperatorTraits<MechanicalBehaviourBase::STANDARDSTRAINBASEDBEHAVIOUR>::STANDARDTANGENTOPERATOR;
const auto r1 = b1.integrate(b1_smflag,CONSISTENTTANGENTOPERATOR);
StiffnessTensor Dt1 = b1.getTangentOperator();
b2.deto=deto;
constexpr auto b2_smflag = TangentOperatorTraits<MechanicalBehaviourBase::STANDARDSTRAINBASEDBEHAVIOUR>::STANDARDTANGENTOPERATOR;
const auto r2 = b2.integrate(b2_smflag,CONSISTENTTANGENTOPERATOR);
StiffnessTensor Dt2 = b2.getTangentOperator();
updateAuxiliaryStateVariables(b1);
updateAuxiliaryStateVariables(b2);
sig = f * sig1 + (1 - f) * sig2;
if (computeTangentOperator_) {
Dt = f * Dt1 + (1 - f) * Dt2;
}
}We can see that we start by integrating the local behaviour. Let’s look on the first phase:
deto.
Furthermore, b1.eto is automatically initialized to
eto1 before the integration of behaviour b1.
This is automatic, and corresponds to call initialize(b1)
before integration.b1 is done via line \(7\) with the integrate method
which takes two arguments (see the documentation from
@BehaviourVariable for more details). r1 is a
boolean which is \(1\) if the
integration went well.getTangentOperator method.Once local integrations have been carried out, it is necessary to
update the auxiliary variables associated with each
@BehaviourVariable. This is done on lines \(16\) and \(17\) with the
updateAuxiliaryStateVariables function. This updates
eto1 (resp. sig1) to the strain (resp. stress)
obtained at the end of the integration of b1, and the same
for the other variables like eel1 or p1. The
same goes for b2.
Finally, the computation of macroscopic stress is given by Taylor scheme (average of local stresses) at line \(19\), and the macroscopic tangent operator is computed in the sequel.
Note that the following property had been defined before the
@Integrator block:
We then use MTest to simulate a uniaxial tensile
test.
MTest file (Taylor.mtest) is the following:
@ModellingHypothesis 'Tridimensional';
@Behaviour<Generic> 'src/libBehaviour.so' 'Taylor';
@MaterialProperty<constant> 'FirstPhaseYoungModulus' 150.e9;
@MaterialProperty<constant> 'FirstPhasePoissonRatio' 0.35;
@MaterialProperty<constant> 'H1' 50.e9;
@MaterialProperty<constant> 's01' 200.e6;
@MaterialProperty<constant> 'SecondPhaseYoungModulus' 90.e9;
@MaterialProperty<constant> 'SecondPhasePoissonRatio' 0.3;
@MaterialProperty<constant> 'H2' 30.e9;
@MaterialProperty<constant> 's02' 50.e6;
@MaterialProperty<constant> 'FirstPhaseFraction' 0.1;
@ExternalStateVariable 'Temperature' 293.15;
@ImposedStrain 'EXX' {0 : 0, 1 : 3e-3};
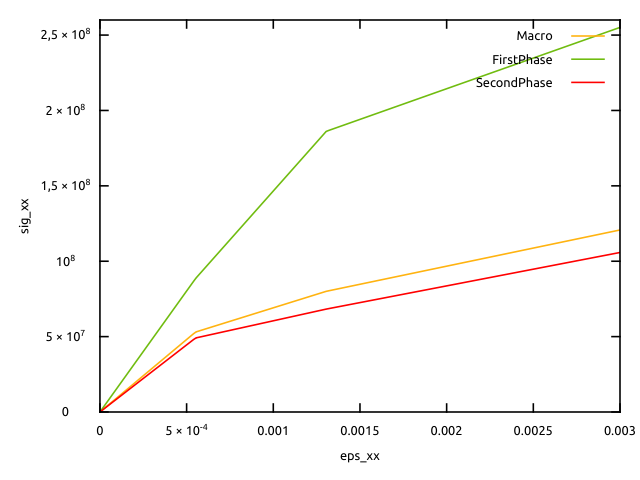
@Times {0, 1 in 200};Macroscopic and local stresses are represented below as functions of the uniform axial strain:
We can see, as expected, that the macroscopic stress is an average of the local stresses. When the lowest yield stress is reached, the corresponding phase becomes plastic. The macroscopic tangent module is then reduced, which has repercussions on the macroscopic stress. The other phase becomes plastic later. Even if its evolution remains elastic, we can see that its axial stress is also impacted by the plastic transition of the other phase, because of the non-axial plastic strains appeared in this latter phase.