The present demo illustrates how multi-physics problems can be coupled and solved in a staggered fashion. This problematic is illustrated on a phase-field approach to brittle fracture in which two different mechanical problems are involved:
Note that for the sake of simplicity, the damage problem considered in this demo is in fact a linear problem and could, therefore, well be formulated directly with FEniCS. We will however implement it as a
MFrontNonlinearProblemto show how information can be exchanged between both problems. Besides, more advanced numerical implementations of the phase-field method involve damage problems which are indeed non-linear.
The problem is that of a stiff circular inclusion embedded in a square plate under imposed vertical displacement on its top surface, see Bourdin, Francfort, and Marigo (2000). Zero Dirichlet boundary conditions will be enforced for the damage field on the inclusion boundary.
Source files:
- Jupyter notebook: mgis_fenics_phase_field.ipynb
- Python file: mgis_fenics_phase_field.py
- MFront behaviour file: PhaseFieldDisplacementSpectralSplit.mfront
- MFront behaviour file: PhaseFieldDisplacementDeviatoricSplit.mfront
- MFront behaviour file: PhaseFieldDamage.mfront
The phase-field approach to brittle fracture originates from the mathematical regularization of Francfort & Marigo variational approach of fracture (see Francfort and Marigo (1998)). Following mathematical works of Ambrosio and Tortorelli (1990), the regularization proposed by Bourdin, Francfort, and Marigo (2000) relies on the following total energy \(\mathcal{E}(u, d) = \mathcal{E}_\text{pot}(u,d)+\mathcal{E}_\text{frac}(d)\) where the potential and fracture energies respectively read as:
\[ \begin{aligned} \mathcal{E}_\text{pot}(u,d) &= \int_\Omega g(d)\dfrac{1}{2}\boldsymbol{\varepsilon}:\mathbb{C}:\boldsymbol{\varepsilon}\,\text{dx}- W_{ext}(u) \\ \mathcal{E}_\text{frac}(d) &= \dfrac{G_c}{c_w} \int_{\Omega}\left( \frac{w(d)}{\ell_0} + \ell_0 \|\nabla d\|^2 \right)\,\text{dx} \end{aligned} \]
in which
This formulation exhibits extremely strong links with damage gradient models Pham et al. (2011) so > that \(d\) is often referred to as a damage variable.
Solutions to the quasi-static evolution at discrete time steps \((u_n,d_n)\) are obtained from a global energy minimum principle on both variables with an additional irreversibility constraint \(d_n\geq d_{n-1}\) for the damage variable.
This original formulation does not distinguish between tensile and compressive stress states, yielding spurious crack formation in compressive regions. A commonly used remedy consists in splitting the energy density \(\psi\) into a positive (associated with tension states) and negative (compressive states) part and apply the degradation function only on the positive part i.e.:
\[ \mathcal{E}_{pot}(u,d) = \int_\Omega \left(g(d)\psi^+(\boldsymbol{\varepsilon})+\psi^-(\boldsymbol{\varepsilon})\right) \,\text{dx}- W_{ext}(u) \]
Different choices of this splitting exist and we use in this demo the volumetric/deviatoric splitting introduced in Amor, Marigo, and Maurini (2009):
\[ \begin{aligned} \psi^+(\boldsymbol{\varepsilon}) &= \dfrac{1}{2}\kappa \langle \operatorname{tr}(\boldsymbol{\varepsilon})\rangle_+^2 + \mu \operatorname{dev}(\boldsymbol{\varepsilon}):\operatorname{dev}(\boldsymbol{\varepsilon})\\ \psi^-(\boldsymbol{\varepsilon}) &= \dfrac{1}{2}\kappa \langle \operatorname{tr}(\boldsymbol{\varepsilon})\rangle_-^2 \end{aligned} \]
where \(\langle \star \rangle_\pm\)
denotes the positive/negative part function, \(\operatorname{dev}\) is the deviatoric
operator and \(\kappa=\lambda+\dfrac{2}{3}\mu\) stands for
the compression modulus. Note that we also provide an implementation of
the spectral splitting introduced by Miehe, Hofacker, and Welschinger (2010) in the
PhaseFieldDisplacementSpectralSplit.mfront
file
A classical choice for the degradation function is \(g(d)=(1-d)^2 + k_\text{res}\) where \(k_\text{res} \ll 1\) is a residual stiffness avoiding singular stiffness in the fully damaged state. As regards the fracture energy density, two choices originating from the work of Ambrosio and Tortorelli (AT) are widely used, namely:
\[ \begin{aligned} \text{AT2 model:} \quad & w(d) = d^2, \quad c_w=2\\ \text{AT1 model:} \quad & w(d) = d, \quad c_w=\dfrac{8}{3} \end{aligned} \]
in which the constant \(c_w\) is chosen so that analytical localized solution profiles correspond to a dissipated precisely equal to \(G_c\).
In this demo we will use the AT2 model.
A classical approach for computing the solution at load increment \(n\) is to resort to a so-called alternate minimization scheme which involves the following steps embedded in an iterative procedure:
\[\begin{align} u^k &= \mathrm{arg min}_u \mathcal{E}(u, d^{k-1}) \tag{$u$-problem}\\ d^k &= \mathrm{arg min}_{d \text{ s.t. } d_{n-1} \leq d} \mathcal{E}(u^k, d) \tag{$d$-problem} \end{align}\]
until convergence.
The first step (\(u\)-problem) of this staggered solution scheme therefore involves solving the following non-linear mechanical problem at fixed damage:
\[ \textrm{Find } u\in V_u \text{ s.t. } \int_\Omega \boldsymbol{\sigma}(u,d_{k-1}):\operatorname{sym}\nabla \widehat{u} \,\text{dx} = W_{ext}(\widehat{u}) \quad \forall \widehat{u}\in V_u \]
with \(\boldsymbol{\sigma}(u,d)=g(d)\dfrac{\partial \psi^+}{\partial \boldsymbol{\varepsilon}}(u)+\dfrac{\partial \psi^-}{\partial \boldsymbol{\varepsilon}}(u)\).
The second step (\(d\)-problem) amounts to solving a variational inequality problem due to the presence of the irreversibility constraint \(d_{n-1} \leq d\). A simple way of enforcing, implicitly, this irreversibility constraint has been proposed in Miehe, Hofacker, and Welschinger (2010) by resorting to a so-called history function which correspond to the maximal value of the tensile energy density \(\psi^+\) over the past loading history:
\[ H = \max_{m \leq n}\{\psi^+(\boldsymbol{\varepsilon}_m)\} \]
Technically, the irreversibility constraint is dropped and the current tensile energy \(\psi^+\) is substituted by \(H\) in the \(d\)-problem. The optimality condition therefore yields the following variational problem:
\[ \textrm{Find } d\in V_d \text{ s.t. } \int_\Omega \left(g'(d)H\widehat{d}+\dfrac{G_c}{\ell_0c_w}\left(w'(d)\widehat{d} + 2\ell_0^2 \nabla d \cdot \nabla \widehat{d}\right)\right) \,\text{dx} = 0 \quad \forall \widehat{d}\in V_d \]
Note that this approach loses the original variational for of the phase-field formulation. In particular, no theoretical results establishing the equivalence with the original constrained minimization problem exist. This approach is however widespread due to its simplicity.
For the retained choice of models, the stress/strain constitutive equation at fixed damage reads as:
\[ \boldsymbol{\sigma}(\boldsymbol{\varepsilon},d)=((1-d)^2+k_\text{res})\left(\kappa \langle \operatorname{tr}(\boldsymbol{\varepsilon})\rangle_+\textbf{I} + 2\mu \operatorname{dev}(\boldsymbol{\varepsilon})\right)+\kappa \langle \operatorname{tr}(\boldsymbol{\varepsilon})\rangle_- \textbf{I} \]
The stress is here explicitly computed from the strain (as in the non-linear
heat transfer demo) so that we use the DefaultDSL.
Material properties are defined, the history function and positive
energy density are decleared as (internal) state variables whereas the
damage field is declared as an external state variable.
@DSL DefaultDSL;
@Author Jérémy Bleyer, Thomas Helfer;
@Date 08 / 04 / 2020;
@Behaviour PhaseFieldDisplacementDeviatoricSplit;
@MaterialProperty stress Yg;
Yg.setGlossaryName("YoungModulus");
@MaterialProperty real ν;
ν.setGlossaryName("PoissonRatio");
@Parameter real kres = 1e-6;
kres.setEntryName("ResidualStiffness");
@StateVariable real H;
H.setEntryName("HistoryFunction");
@StateVariable real Ψ₊;
Ψ₊.setEntryName("PositiveEnergyDensity");
@ExternalStateVariable real d;
d.setGlossaryName("Damage");We now write the behaviour and provide consistent tangent operators for the problem at fixed damage i.e. the tangent operator is actually the secant operator for the coupled \((u,d)\) problem.
@ProvidesSymmetricTangentOperator;
@Integrator {
// update the damage
const auto d_ = d + dd;
// lame coefficients
const auto λ = computeLambda(Yg, ν);
const auto μ = computeMu(Yg, ν);
// compression modulus
const auto κ = λ + 2 / 3 ⋅ μ;
// computation of the stress, positive energy density and consistent
// tangent operator
const auto ε = eval(eto + deto);
const auto tr = trace(ε);
const auto εᵈ = deviator(ε);
// energy density
const auto tr_p = max(tr, strain(0));
const auto tr_n = tr - tr_p;
Ψ₊ = (κ / 2) ⋅ (tr_p) ⋅ (tr_p) + μ ⋅ (εᵈ | εᵈ);
// history function
H = max(H, Ψ₊);
// degradation function
const auto gᵈ = (1 - d_) ⋅ (1 - d_) + kres;
// stress
σ = κ ⋅ (gᵈ ⋅ tr_p + tr_n) ⋅ I₂ + 2 ⋅ μ ⋅ gᵈ ⋅ εᵈ;
// consistent tangent operator (secant one here)
if (computeTangentOperator_) {
static_cast<void>(smt);
if (tr >= 0) {
∂σ∕∂Δεᵗᵒ = gᵈ ⋅ (κ ⋅ (I₂ ⊗ I₂) + 2 ⋅ μ ⋅ Stensor4::K());
} else {
∂σ∕∂Δεᵗᵒ = κ ⋅ (I₂ ⊗ I₂) + gᵈ ⋅ 2 ⋅ μ ⋅ Stensor4::K();
}
}
} // end of @Integratornote that we used Stensor4::K() in the above definition,
which correspond to \(\mathbb{K} =
\mathbb{I}-\dfrac{1}{3}\mathbf{I}\otimes\mathbf{I}\), the
projection operator on the deviatoric space \(\mathbb{K}:\boldsymbol{\varepsilon}=
\operatorname{dev}(\boldsymbol{\varepsilon})\).
Finally, we compute the internal stored energy using
@InternalEnergy:
@InternalEnergy {
const auto gᵈ = ((1 - d) ⋅ (1 - d)) + kres;
Psi_s = gᵈ ⋅ Ψ₊;
}The damage problem variational form using the history function approach for the AT2 model writes:
\[ \textrm{Find } d\in V_d \text{ s.t. } \int_\Omega \left(\dfrac{G_c}{\ell_0}\left(\ell_0^2 \nabla d \cdot \nabla \widehat{d} + d \widehat{d}\right) - 2H(1-d)\widehat{d}\right) \,\text{dx} = 0 \quad \forall \widehat{d}\in V_d \]
which can therefore be rewritten as follows to fit the standard format using pairs of flux/gradient variables:
\[ \textrm{Find } d\in V_d \text{ s.t. } \int_\Omega (\mathbf{q}\cdot \nabla \widehat{d} + Y\widehat{d})\,\text{dx} = 0 \quad \forall \widehat{d}\in V_d \]
where \(\mathbf{q} = G_c \ell_0 \nabla d\) is the dual “flux”-like variable associated with the damage gradient \(\mathbf{g} =\nabla d\) and \(Y=\left(\dfrac{G_c}{\ell_0}+2H\right)d-2H\) is the dual “flux”-like variable associated with the damage itself, interpreted (up to a change of sign) as an energy release rate.
Note that the following equivalent reformulation would have also been possible:
\[ \textrm{Find } d\in V_d \text{ s.t. } \int_\Omega (\mathbf{q}\cdot \nabla \widehat{d} + Y'\widehat{d})\,\text{dx} - \int_\Omega 2H\widehat{d}\,\text{dx} = 0 \quad \forall \widehat{d}\in V_d \]
with here \(Y'= \left(\dfrac{G_c}{\ell_0}+2H\right)d\). The second linear term in the above variational form is interpreted here as a source term and would have been added to the problem formulation using the
set_loadingmethod.
This formulation readily translates into the
PhaseFieldDamage.mfront script:
@DSL DefaultGenericBehaviour;
@Behaviour PhaseFieldDamage;
@Author Jérémy Bleyer;
@Date 07 / 04 / 2020;
@Gradient real d;
d.setGlossaryName("Damage");
@Flux real Y;
Y.setEntryName("EnergyRelease");
@Gradient TVector g;
g.setEntryName("DamageGradient");
@Flux TVector q;
q.setEntryName("DualDamageGradient");
@TangentOperatorBlock ∂q∕∂Δg;
@AdditionalTangentOperatorBlock ∂Y∕∂Δd;where the pairs \((Y,d)\) and \((\mathbf{q},\mathbf{g})\) of dual variables
have been defined using the DefaultGenericBehaviour and the
corresponding required tangent operator blocks ∂q∕∂Δg and
∂Y∕∂Δd have been defined.
Material properties \(G_c\) and \(\ell_0\) are now defined and we declare the history function \(H\) as an external state variable.
@MaterialProperty real l₀;
l₀.setEntryName("RegularizationLength");
@MaterialProperty real Gc;
Gc.setEntryName("FractureEnergy");
@ExternalStateVariable real H;
H.setEntryName("HistoryFunction");Finally, the integrator writes the linear behaviour and defines the expressions for the tangent operator blocks and we also compute the dissipated fracture energy density:
@ProvidesTangentOperator;
@Integrator {
// remove useless warnings, as we always compute the tangent operator
static_cast<void>(computeTangentOperator_);
∂q∕∂Δg = Gc*l₀* tmatrix<N, N, real>::Id();
∂Y∕∂Δd = Gc/l₀+2*H;
q = Gc*l₀*(g+Δg);
Y = ∂Y∕∂Δd ⋅ (d+Δd)-2*H;
}
@DissipatedEnergy{
Psi_d = Gc/2/l₀*(d*d + l₀*l₀*(g|g));
}from dolfin import *
from mshr import *
import mgis.fenics as mf
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import clear_output
N = 100
domain = Rectangle(Point(0, 0), Point(1, 1)) - Circle(Point(0.5, 0.5), 0.2, 40)
mesh = generate_mesh(domain, N)
Vu = VectorFunctionSpace(mesh, "CG", 1)
u = Function(Vu, name="Displacement")
def top(x, on_boundary):
return near(x[1], 1) and on_boundary
def internal(x, on_boundary):
return near((x[0]-0.5)**2+(x[1]-0.5)**2, 0.2**2, 0.05) and on_boundary
Uimp = Expression(("0", "t"), t=1, degree=0)
bcu = [DirichletBC(Vu, Constant((0, 0)), internal),
DirichletBC(Vu, Uimp, top)]
v = Function(Vu)
bcu[1].apply(v.vector())
Vd = FunctionSpace(mesh, "CG", 1)
d = Function(Vd, name="Damage")
dold = Function(Vd, name="Previous damage")
bcd = DirichletBC(Vd, Constant(0.), internal)We now define the displacement \(u\)-problem by loading the
PhaseFieldDisplacement behaviour. Since the damage variable
has been declared as an external state variable for this problem, we
must register it with the damage field d. We also retrieve
the HistoryFunction internal state variable H
which will then be used as an external state variable for the damage
problem. We finally recall that automatic registration of the strain is
used here.
E, nu = 200, 0.2
material_u = mf.MFrontNonlinearMaterial("./src/libBehaviour.so",
"PhaseFieldDisplacementDeviatoricSplit",
hypothesis="plane_strain",
material_properties={"YoungModulus": E,
"PoissonRatio": nu})
problem_u = mf.MFrontNonlinearProblem(u, material_u, quadrature_degree=0, bcs=bcu)
problem_u.register_external_state_variable("Damage", d)
H = problem_u.get_state_variable("HistoryFunction")
problem_u.solver.parameters["report"] = FalseSimilarly, the damage problem is defined from the
PhaseFieldDamage behaviour. The latter is a generalized
behaviour which involves two gradients (as discussed in the corresponding
section) which must be registered with their corresponding UFL
representations. As mentioned before, for this behaviour
HistoryFunction is an external state variable which is now
registered as being H.
Gc, l0 = 1., 0.02
material_d = mf.MFrontNonlinearMaterial("./src/libBehaviour.so",
"PhaseFieldDamage",
hypothesis="plane_strain",
material_properties={"RegularizationLength": l0,
"FractureEnergy": Gc})
problem_d = mf.MFrontNonlinearProblem(d, material_d, quadrature_degree=0, bcs=bcd)
problem_d.register_gradient("Damage", d)
problem_d.register_gradient("DamageGradient", grad(d))
problem_d.register_external_state_variable("HistoryFunction", H)
problem_d.solver.parameters["report"] = FalseWe now implement the load-stepping procedure and, for each load step, the alternate minimization algorithm between the \(u\)-problem and the \(d\)-problem. The alternate minimization iterations are stopped when $|d-d_{old}|_ $ between two consecutive damage fields.
After convergence of an alternate minimization step, we compute the
vertical force acting on the top surface. For this purpose, we
previously defined a function v with a vertical component
equal to 1 on the top boundary and zero everywhere. The action of the
residual form in this field is precisely the resulting vertical force of
the imposed boundary conditions. We also compute the total stored and
dissipated energy. The former has been defined in
PhaseFieldDisplacement.mfront and the second in
PhaseFieldDamage.mfront.
tol, Nitermax = 1e-3, 500
loading = np.concatenate((np.linspace(0, 70e-3, 6),
np.linspace(70e-3, 125e-3, 26)[1:]))
N = loading.shape[0]
results = np.zeros((N, 3))
for (i, t) in enumerate(loading[1:]):
print("Time step:", i+1)
Uimp.t = t
# Start alternate minimization
res = 1.
j = 1
while res > tol and j < Nitermax:
# Solve displacement u-problem
problem_u.solve(u.vector())
# Solve damage d-problem
dval_old = d.vector().get_local()
problem_d.solve(d.vector())
# Residual on damage increment
dval = d.vector().get_local()
res = np.max(dval - dval_old)
print(" Iteration {}: {}".format(j, res))
j += 1
results[i+1, 0] = assemble(action(problem_u.residual, v))
results[i+1, 1] = problem_u.get_stored_energy()
results[i+1, 2] = problem_d.get_dissipated_energy()
clear_output(wait = True)
plt.figure()
p=plot(d, vmin=0, vmax=1)
plt.colorbar(p)
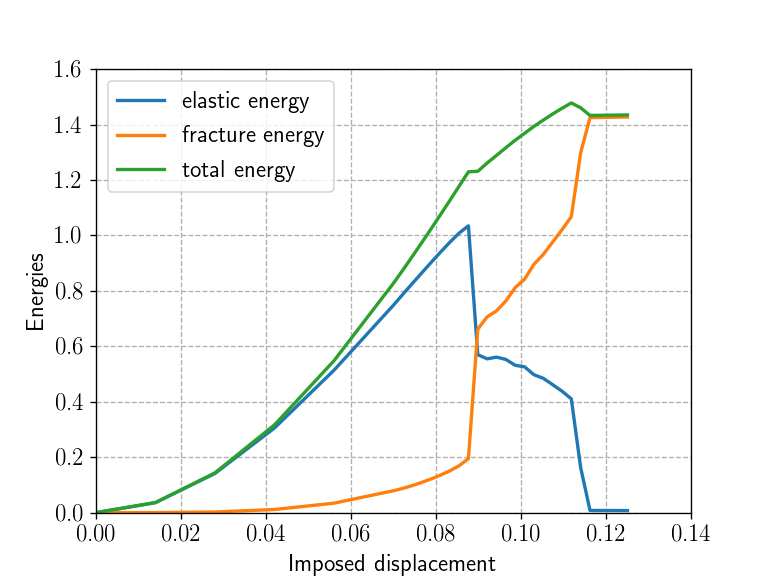
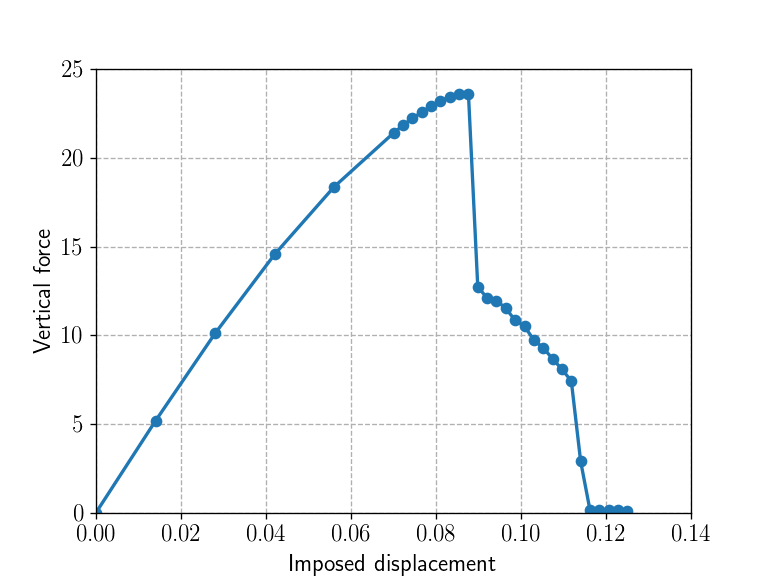
plt.savefig("./results/phase_field_{:04d}.png".format(i), dpi=400) Load-displacement and energy evolution curves show that there is a phase of brutal crack nucleation followed by a more stable crack propagation phase towards the plate boundaries. The solution vertical symmetry is lost in the last load steps when approaching the plate boundaries as already mentioned in Bourdin, Francfort, and Marigo (2000).
%matplotlib notebook
plt.figure()
plt.plot(loading, results[:, 0], "-o")
plt.xlabel("Imposed displacement")
plt.ylabel("Vertical force")
plt.show()
plt.figure()
plt.plot(loading, results[:, 1], label="elastic energy")
plt.plot(loading, results[:, 2], label="fracture energy")
plt.plot(loading, results[:, 1] + results[:, 2], label="total energy")
plt.xlabel("Imposed displacement")
plt.ylabel("Energies")
plt.legend()
plt.show()